Aggiornamenti del Multibody Dynamics Module
COMSOL Multiphysics® versione 5.3 introduce nel Multibody Dynamics Module un tutorial che combina l'analisi dinamica multibody con l'acustica, per simulare il rumore prodotto in una scatola del cambio, e un tutorial che combina il Multibody Dynamics Module con l'AC/DC Module per simulare un motore a induzione. Tutte le informazioni su questi tutorial e sulle altre novità del Multibody Dynamics Module sono riportate qui di seguito.
Selezioni evidenziate nelle analisi di dinamica multibody
Quando si lavora con assemblaggi complessi nell'interfaccia Multibody Dynamics, è facile che siano presenti molti giunti, ciascuno contenente la selezione di due domini rigidi o attachment. Quando si seleziona un nodo Joint nella struttura del modello, gli oggetti connessi vengono evidenziati automaticamente nella finestra grafica. Questo permette di avere un feedback sulla correttezza delle selezioni di origine e destinazione. Allo stesso modo, anche i due ingranaggi in un nodo Gear Pair e le due parti connesse con il nodo Spring-Damper ora vengono evidenziati quando si selezionano i nodi corrispondenti.
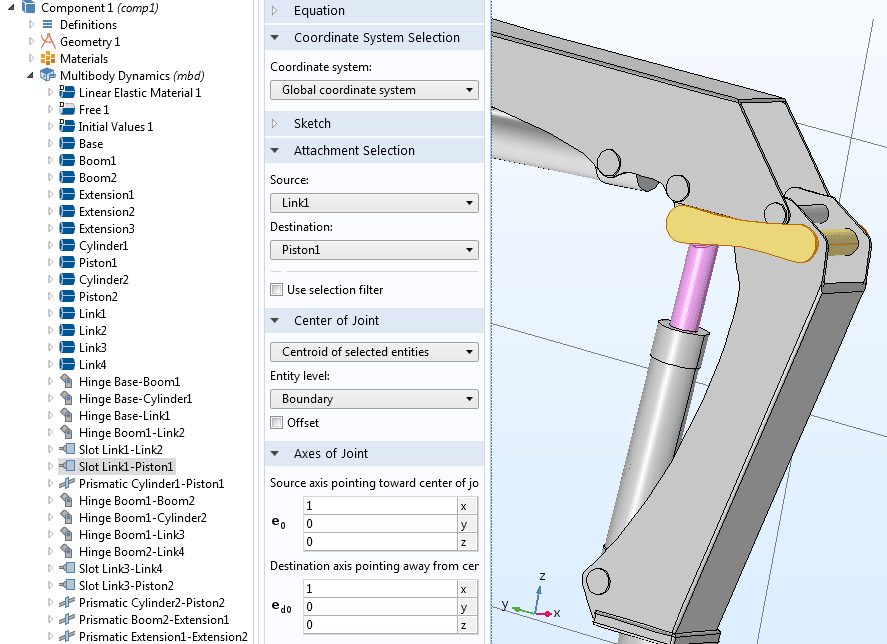
I due domini rigidi collegati da un giunto a cerniera vengono evidenziati quando si seleziona il rispettivo nodo Joint.
Metodo penalty per il calcolo delle forze sul giunto
Capita spesso che un modello risulti sovravincolato in sistemi di corpi rigidi. Per questo è stato aggiunto un metodo penalty per imporre vincoli ai giunti. Se questo metodo è applicabile, è possibile determinare le forze in corrispondenza dei giunti. Inoltre, come impostazione predefinita, le forze sui giunti che connettono corpi rigidi non vengono calcolate, per ridurre il rischio di problemi numerici causati da sistemi sovravincolati.
{kind=link}
Studio Modal Reduced Order Model
Lo studio Modal Reduced Order Model è ora supportato nell'interfaccia Multibody Dynamics. È utile per estrarre le matrici di sistema in una base modale per modelli di dinamica multibody di grandi dimensioni.
Attachment su corpi rigidi
È ora possibile utilizzare l'opzione Attachment su un dominio rigido; questo facilita la commutazione tra rappresentazione rigida e rappresentazione deformabile. Permette, infatti, di non dover cambiare le selezioni nella finestra delle impostazioni del nodo Joint.
Discretizzazione con funzioni di forma serendipity
Quando si modellano parti deformabili nell'interfaccia Multibody Dynamics, è possibile scegliere di discretizzare utilizzando funzioni di forma serendipity. Così si riduce il numero di gradi di libertà in presenza di mesh strutturate con elementi di ordine superiore in domini deformabili.
Soppressione automatica dei moti di corpo rigido
Nei casi in cui i carichi sono auto-equilibranti, le posizioni dei vincoli necessari non sono importanti. I modelli caratterizzati dalla presenza di carichi auto-equilibranti possono essere analizzati a patto che i vincoli soddisfino le seguenti condizioni: non sia possibile alcun moto del corpo rigido e non vengano introdotte forze di reazione. Ora si può utilizzare la nuova condizione Rigid Motion Suppression per questo genere di analisi. Questa funzione applica automaticamente una serie di vincoli idonei basati sulla geometria e sulle interfacce fisiche.
La funzionalità Rigid Motion Suppression è disponibile per le seguenti interfacce fisiche:
- Solid Mechanics (3D, 2D, 2D assialsimmetrica)
- Shell (3D)
- Plate (2D)
- Membrane (3D, 2D)
- Beam (3D, 2D)
- Truss (3D, 2D)
- Multibody Dynamics (3D, 2D)
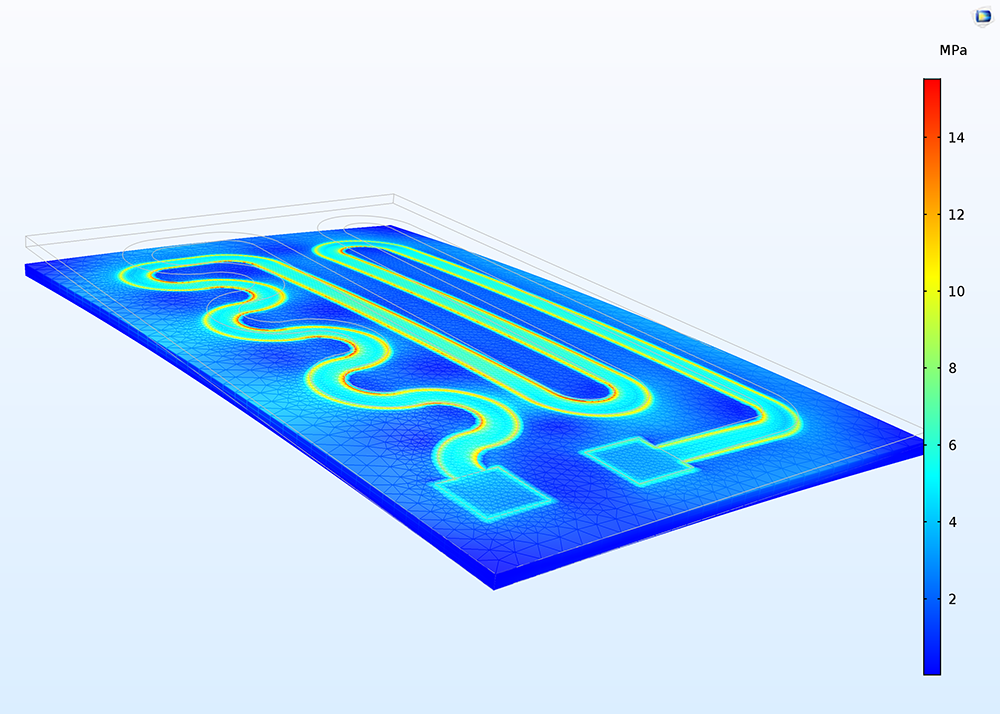
In questo esempio un circuito di riscaldamento si deforma a causa della dilatazione termica. L'applicazione della condizione Rigid Motion Suppression assicura che il modello abbia vincoli sufficienti per una risoluzione corretta. Il grafico mostra gli sforzi di von Mises.
Percorso dell'Application Library con un esempio di soppressione dei moti di corpo rigido:
Structural_Mechanics_Module/Thermal-Structure_Interaction/heating_circuit
Nuovo tutorial: Vibrations and Noise in a Gearbox
Questo tutorial illustra la modellazione della vibrazione e del rumore in un cambio manuale a 5 velocità. Un'analisi tempo-dipendente della dinamica multibody calcola le vibrazioni del cambio per velocità e carico esterno assegnati. L'accelerazione normale della scatola del cambio viene convertita nel dominio delle frequenze, per utilizzarla come sorgente di rumore. Si esegue quindi un'analisi acustica per calcolare i livelli di pressione sonora nei campi vicino, lontano ed esterno.
Nota: questo modello richiede anche l'Acoustics Module.
 Distribuzione degli sforzi nella scatola del cambio e livello di pressione sonora nell'aria circostante (in alto e in basso a destra) di un cambio manuale a 5 marce. Viene anche mostrato lo spettro di frequenza dell'accelerazione normale in uno dei punti del modello (in basso a sinistra).
Distribuzione degli sforzi nella scatola del cambio e livello di pressione sonora nell'aria circostante (in alto e in basso a destra) di un cambio manuale a 5 marce. Viene anche mostrato lo spettro di frequenza dell'accelerazione normale in uno dei punti del modello (in basso a sinistra).
Percorso dell'Application Library:
Multibody_Dynamics_Module/Automotive_and_Aerospace/gearbox_vibration_noise
Nuovo tutorial: Vibration in an Induction Motor
Nel tutorial Vibration in an Induction Motor, le correnti parassite sono indotte nel rotore da correnti sinusoidali negli avvolgimenti dello statore e dalla rotazione del rotore stesso. Le correnti indotte nel rotore interagiscono con il campo magnetico prodotto dalle bobine per generare la coppia motrice sul rotore. Il traferro tra il rotore e lo statore è asimmetrico, e questo induce vibrazioni nel motore.
La simulazione elettromagnetica è modellata in 2D, mentre la simulazione di dinamica multibody è modellata in 3D. La coppia viene calcolata in funzione del tempo. Tale valore viene poi utilizzato nel modello di dinamica multibody per calcolare la velocità del rotore, tenendo conto degli effetti inerziali. A causa delle perdite resistive e della coppia agente sull'albero, il rotore non ruoterà alla stessa velocità degli avvolgimenti dello statore; si verificherà quindi uno slittamento angolare.
Nota: questo modello richiede anche l'AC/DC Module e lo Structural Mechanics Module.
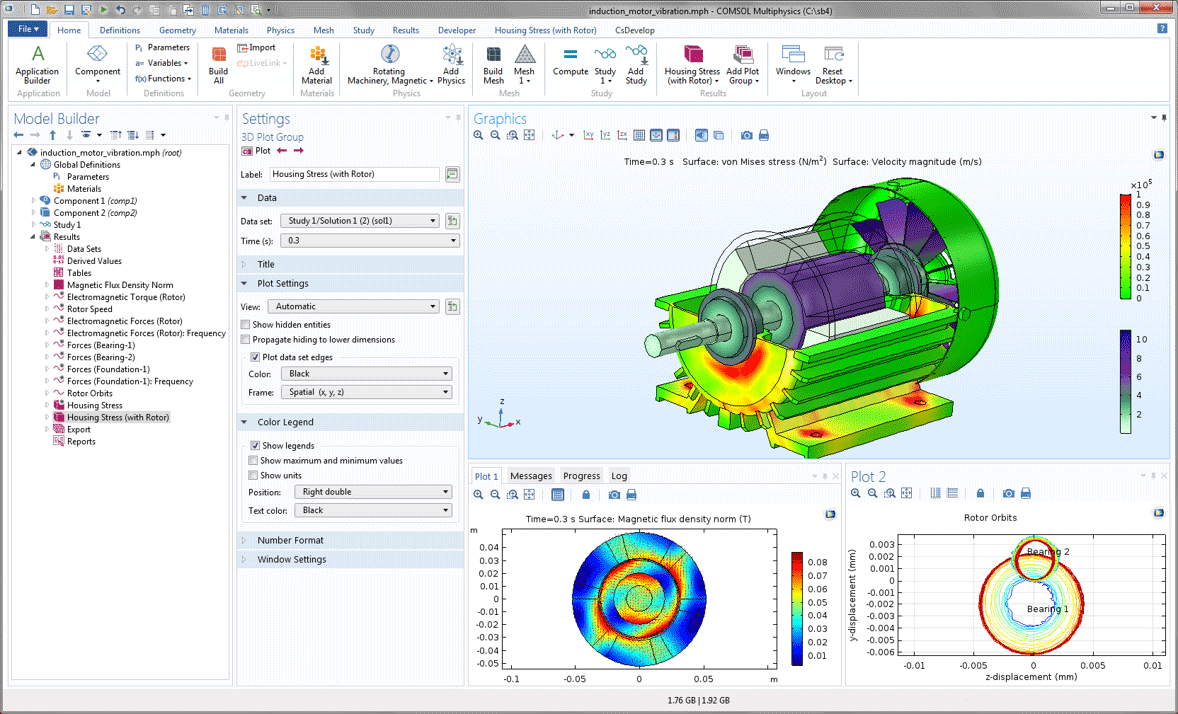 Grafico degli sforzi nell'alloggiamento di un motore a induzione (in alto) e densità del flusso magnetico nel rotore (in basso a sinistra). È mostrata anche l'orbita del rotore in corrispondenza dei cuscinetti (in basso a destra).
Grafico degli sforzi nell'alloggiamento di un motore a induzione (in alto) e densità del flusso magnetico nel rotore (in basso a sinistra). È mostrata anche l'orbita del rotore in corrispondenza dei cuscinetti (in basso a destra).
Percorso dell'Application Library:
Multibody_Dynamics_Module/Machinery_and_Robotics/induction_motor_vibration
Nuovo tutorial: Noise Radiation by a Compound Gear Train
Per i progettisti, prevedere la radiazione acustica di un sistema dinamico significa capire a fondo il comportamento dei meccanismi di movimento sin dalle prime fasi dello sviluppo. Si prenda, ad esempio, una scatola del cambio in cui le variazioni della rigidezza degli ingranaggi inducono vibrazioni. Queste vibrazioni vengono trasmesse alla scatola del cambio attraverso alberi e giunti. L'alloggiamento vibrante trasmette energia al fluido circostante, con conseguente radiazione di onde acustiche.
Questo tutorial simula la radiazione acustica emessa dall'alloggiamento di un treno di ingranaggi. In primo luogo, viene eseguita un'analisi di dinamica multibody nel dominio del tempo per calcolare le vibrazioni dell'alloggiamento corrispondenti a una specifica velocità dell'albero motore. Quindi, viene eseguita un'analisi acustica a una frequenza selezionata, per calcolare i livelli di pressione sonora nei campi vicino, lontano ed esterno utilizzando come sorgente di rumore l'accelerazione normale dell'alloggiamento.
Nota: questo modello richiede anche l'Acoustics Module e lo Structural Mechanics Module.
Accelerazione normale sull'alloggiamento del treno di ingranaggi. Nel modello viene anche calcolata la pressione acustica irradiata.
Percorso dell'Application Library:
Acoustics_Module/Vibrations_and_FSI/gear_train_noise