
Therapy methods that incorporate localized suction, such as cupping, cause deformation of skin and the underlying tissues. To gain a better understanding of the tissue biomechanics involved in cupping, Edidiong Etim and her team at the University of Massachusetts, Lowell (UML) used the COMSOL Multiphysics® software to analyze how deformation varies with suction pressure, aperture size, and fat thickness.
Cupping Therapy Explored
Suction pressure elevates skin, fat, and muscle to varying extents depending on the pressure level and contact area. Along with cupping therapy (Figure 1), suction is used in medical applications such as cryolipolysis for fat freezing and reduction, lymphatic therapy to promote fluid drainage, and laser therapy, such as in port-wine stain (PWS) laser treatment, where lasers are used to lower blood vessel visibility.
Etim and her team are working to increase understanding of how suction pressure and applicator size influence the stress distribution across tissue layers. Computational modeling can be used to study the stress patterns and specific responses in each layer of skin during suction. By understanding how skin deforms under suction pressure, researchers can better predict the effects of devices and assess extreme loading conditions. Moreover, these insights can help medical device designers develop more reliable models and optimize device design.
Before diving into how Etim and her team used simulation, let’s consider the layers of skin and their relationship with medical applicators.
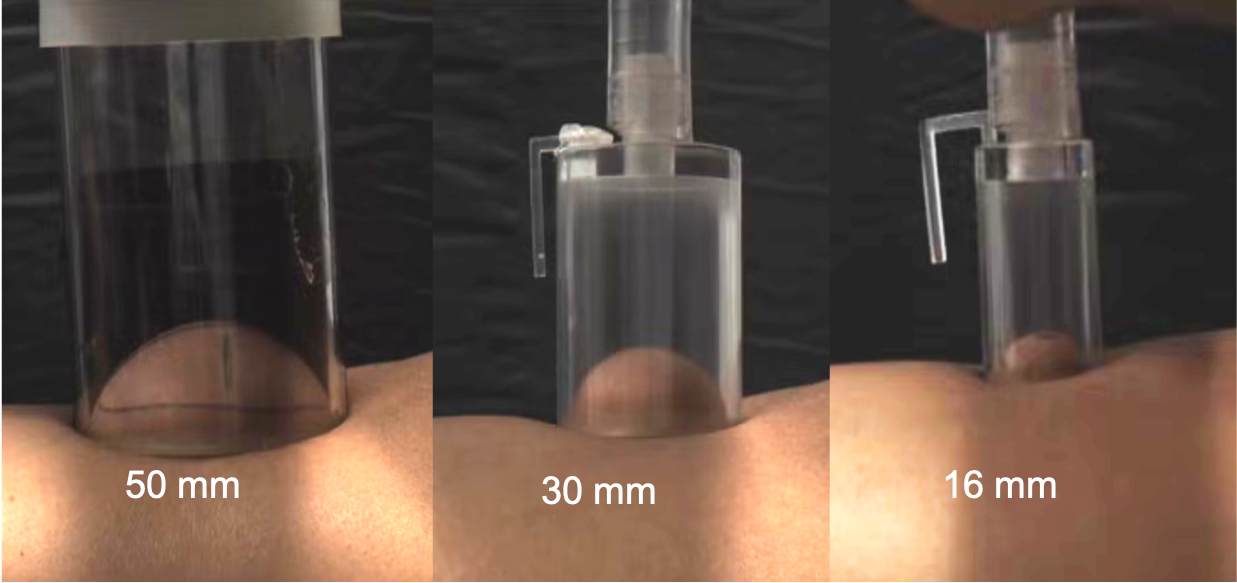 Figure 1. Cupping therapy, which results in deformation of the skin and underlying tissue due to suction.
Figure 1. Cupping therapy, which results in deformation of the skin and underlying tissue due to suction.
Layers of Skin & Aperture Sizes
Skin is made up of three primary layers:
- Epidermis
- Dermis
- Hypodermis
The epidermis is the protective outer layer of skin, consisting of four layers over most of the body and five layers on the palms and soles. The dermis contains blood vessels, nerves, hair follicles, and sweat glands. This layer deforms anisotropically due to the preferential orientation of collagen fibers. The foam-like hypodermis insulates the body, cushions organs, and stores subcutaneous fat, behaving as an energy-absorbing layer because of its collagen matrix, which encloses lipid-filled adipocytes.
Suction devices have typically been made with apertures under 10 mm; however, clinical applications such as cupping therapy, laser-assisted PWS removal, and some cryolipolysis applicators can use larger apertures ranging from 30–65 mm, highlighting the need to evaluate a broader range of loading geometries. Smaller apertures primarily engage the epidermis and dermis layers, where the fiber alignment may play a stronger role, whereas larger apertures engage the hypodermis and muscle underneath.
Now, we’ll dive into how simulation was used to analyze tissue.
Setting Up the Model
Etim and her team used a phenomenological approach to estimate the properties of skin, fat, and muscle for different participants, also considering different aperture sizes. They began with a single-phase solid mechanics model in COMSOL Multiphysics®, with the governing momentum balance equation
where ρ is the density, u is the displacement field, fv represents the volume forces, F is the deformation gradient, and S is the second Piola–Kirchhoff stress tensor. The Green–Lagrange strain tensor is defined as
Stress and strain are connected by the strain energy density function W as
Skin (W_S) was modeled using the polynomial model:
and fat (W_F) was modeled using the Mooney–Rivlin formulation:
The muscle was modeled with an Ogden formulation:
The team implemented a multilayered, axisymmetric finite element model of skin, fat, and muscle in COMSOL Multiphysics®. Skin thickness was set to 2 mm, muscle thickness was set to 10 mm, and fat thickness was set to values specific to the results of participant ultrasound measurements gathered in a study. The simulation represented suction loading for applicators with aperture sizes of 50, 30, and 16 mm. The layers are assumed to be bonded without friction. Etim explained that a uniform suction pressure was applied at the skin surface over each aperture radius, and a boundary condition was imposed to enable the skin to slide along the rim of the cup.
Etim and her team used the Optimization Module, an add-on to COMSOL Multiphysics®, to estimate the properties of skin and fat while keeping the properties of muscle constant. C_{01F} was assumed to be zero, while C_{10S}, C_{11S}, and C_{10F} were optimized by minimizing the deviation between the deformations seen in experiments and those in the model. A time-dependent model involving a wide pressure range was used, but the material properties in this optimization were initialized with the results of an optimization for a single high pressure. This methodology enabled the team to capture nonlinear pressure-displacement behavior.
Simulation Results
The results of the simulation showed that tissue deformation increased with suction pressure, with the magnitude and distribution influenced by aperture size and fat thickness (Figure 2). As expected, the simulation showed larger deformation for both larger suction pressure and larger aperture size, with the smaller apertures increasing the engagement of the upper skin layers.
Since the results were based on real data from individual participants with varying levels of fat thickness, the results also showed that differences in fat thickness of approximately 2 mm between participants led to distinct shifts in deformation profiles.
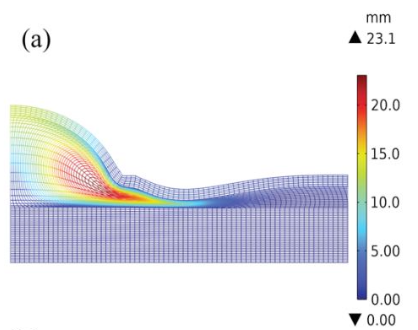


Figure 2. Displacement of skin and fat at 27091.109 pascals (Pa) for a participant with a 4.0-mm fat thickness when aperture sizes of 50 mm (a), 30 mm (b), and 16 mm (c) were used.
The effect of different material property combinations was investigated, and it was found that variations in the fat stiffness of the participant had a stronger influence on deformation with the 50-mm aperture than the 30-mm and 16-mm apertures. These results highlight the importance of taking into account the applicator geometry as well as the composition of the tissue in the individual participant.
Let’s take a closer look at a stress analysis in one individual participant who has a 6.3-mm fat thickness. The skin reacted with the highest stresses near the center of the suction cup, particularly in the circumferential and axial directions when a pressure of 27091.109 Pa (or 203.2 mmHg) was applied. In contrast, the fat layer showed low circumferential and axial stresses, despite large deformation. Shear stress remained minimal across conditions. The muscle experienced less stress, although it was more widely spread out. Other participants who had thinner fat thickness resulted in higher and more widely distributed values. In the muscle layer, the largest stress component is the axial stress (Figure 3). This stress analysis suggested to Etim and the team that fat thickness modulates load transfer and acts as a protective layer, providing a buffer to deeper tissue during suction loading.
 Figure 3. Three components of the stress tensor are plotted at the mid-depth of the skin, fat, and muscle layers. The results are for a pressure of 27091.109 Pa in a cup with a 50-mm aperture.
Figure 3. Three components of the stress tensor are plotted at the mid-depth of the skin, fat, and muscle layers. The results are for a pressure of 27091.109 Pa in a cup with a 50-mm aperture.
Insights from Simulating Tissue
The results of this study indicate that both aperture size and fat thickness significantly influence the deformation caused by suction. The larger aperture, 50 mm, engaged more of the fat layer, deeper into the tissue, and produced more consistent results. The smaller apertures, 30 mm and 16 mm, engaged primarily the upper skin layers and showed higher variability. As Etim explained, these results highlight the importance of characterizing tissue under multiple loading geometries and pressures. Accurate representation of both skin and fat properties is crucial in the design and performance of medical devices that use suction.
Further Learning
For more information on this work, read the UML team’s full paper, which won a Best Paper award at the COMSOL Conference 2025 Boston! The paper outlines the team’s modeling approach and results.


Comments (0)