Multibody Dynamics Module Updates
For users of the Multibody Dynamics Module, COMSOL Multiphysics® version 6.0 brings improved rigid body contact, component mode synthesis, and a new feature for point loads at arbitrary locations. Read about these and more updates below.
Component Mode Synthesis
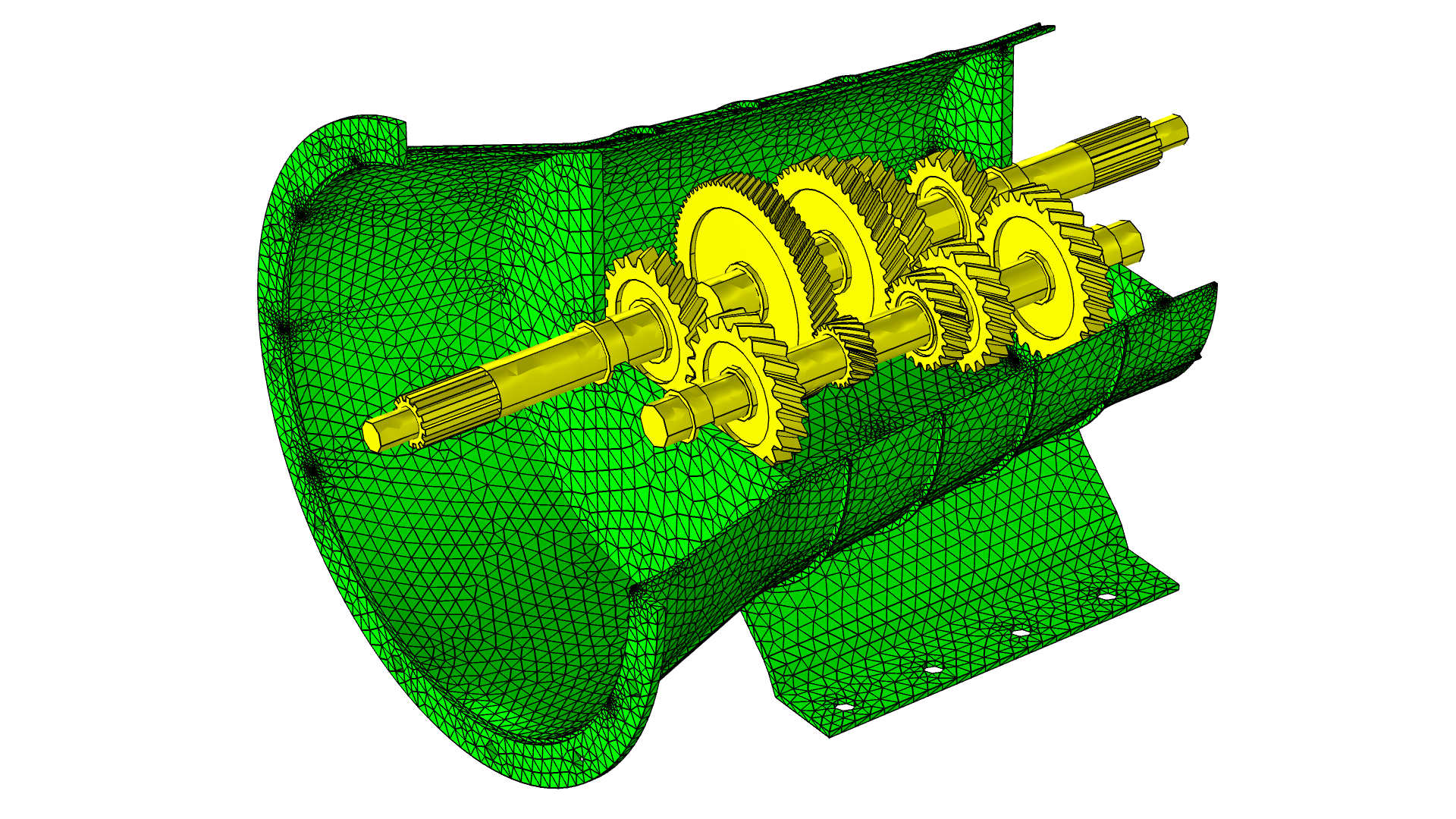
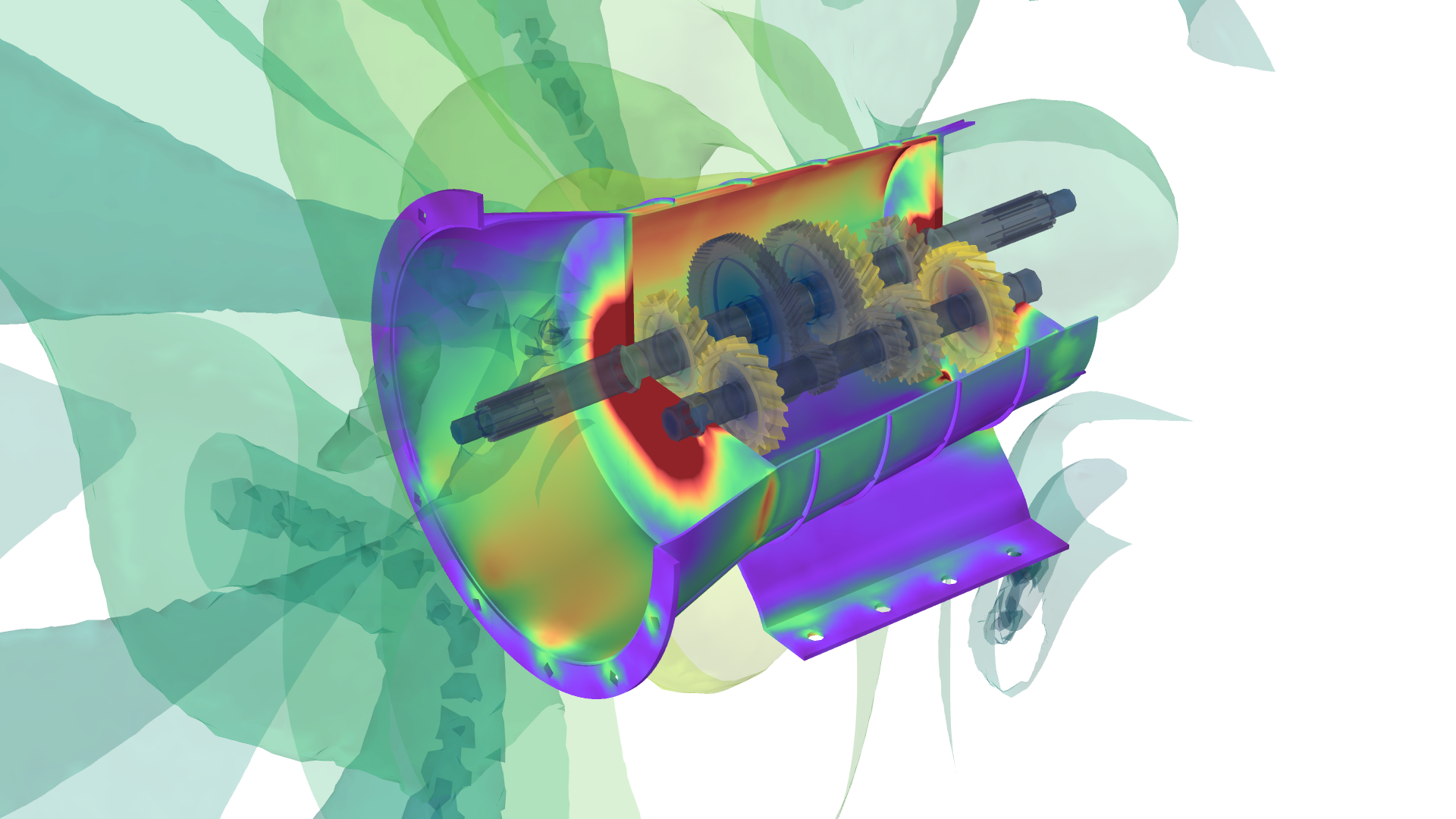
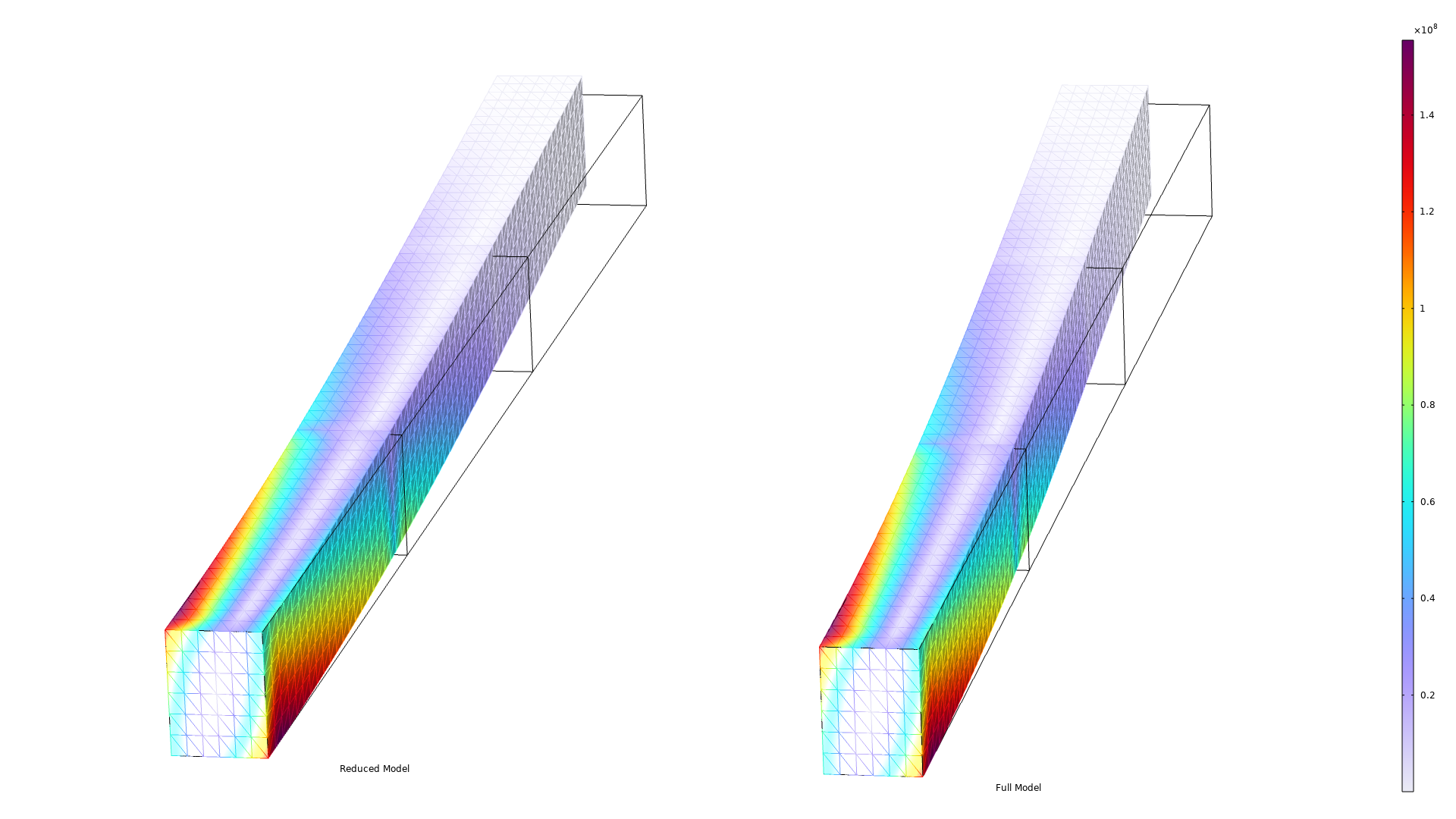
Linear components built using the Solid Mechanics and Multibody Dynamics interfaces can be reduced to computationally efficient reduced-order models using the Craig–Bampton method. Such components can then be used in dynamic or stationary analyses, either in a model consisting entirely of reduced components or together with nonreduced elastic finite element models. The latter can then be nonlinear. The approach, which is called component mode synthesis (CMS) or dynamic substructuring, can give large improvements in terms of computing time and memory usage. The results, such as stresses and strains, in a reduced component can be presented in the same way as for any other part of the model. View this new feature in the Modeling Vibration and Noise in a Gearbox: CMS Version tutorial model.
New Cylindrical Shape in Rigid Body Contact
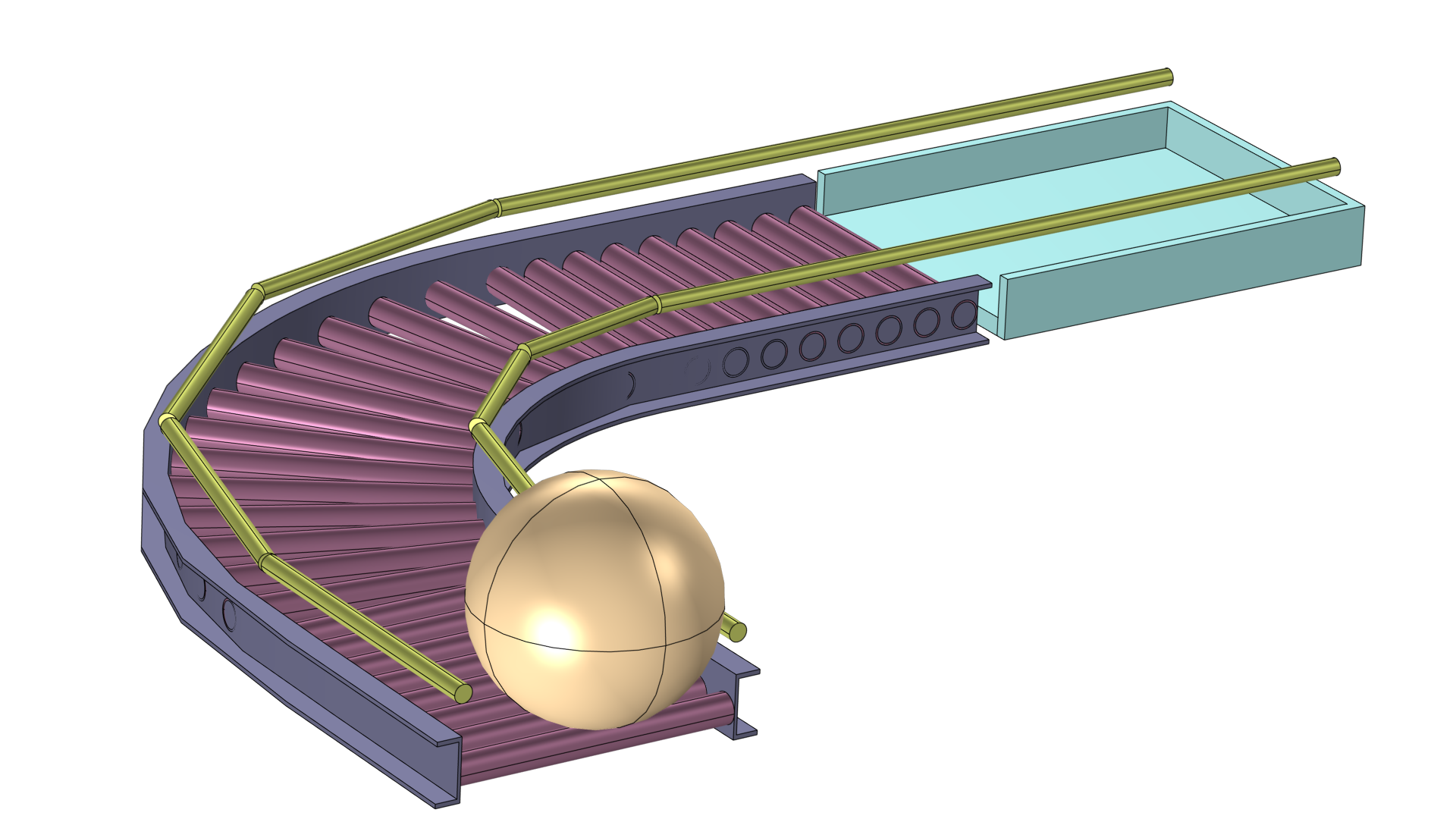
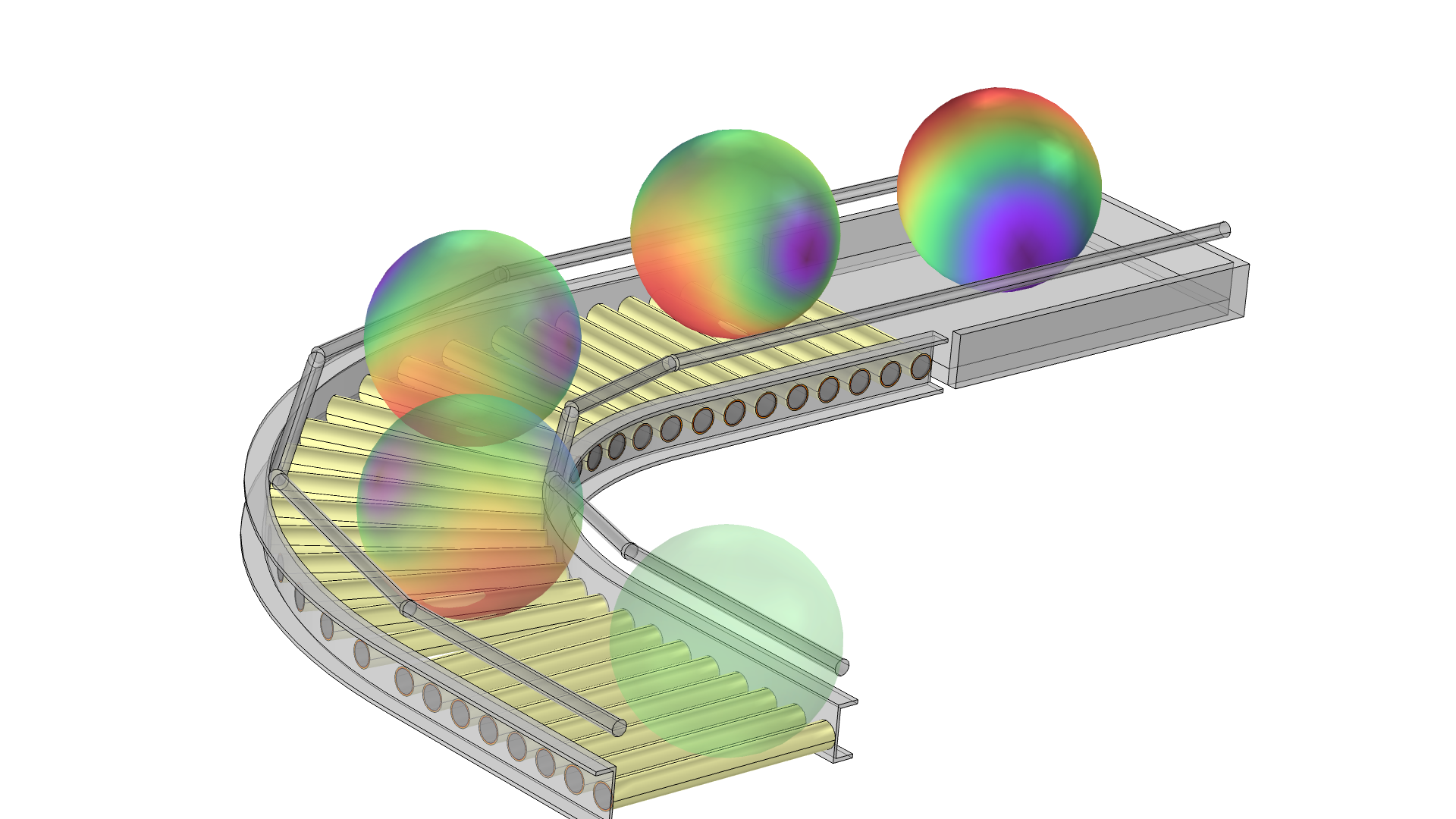
The Rigid Body Contact feature, available with the Multibody Dynamics interface, has been extended and additional standard shapes are now available in 3D and 2D. There is now support for Cylindrical shapes in 3D, which makes it possible to model sphere–cylinder as well as cylinder–cylinder contact. The new cylinder–cylinder contact can, for example, handle the following scenario:
- Parallel, intersecting, or neither parallel nor intersecting configurations
- Finite or infinite cylinders
- Exterior or interior contacts
You can view this new feature in the Dynamics of a Roller Conveyor tutorial model.
New Planar Shape in Rigid Body Contact
In previous versions, it was possible to model contact with a planar shape using the user-defined Arbitrary shape option in the Rigid Body Contact feature. Now, there is direct support for the Planar shape in the Rigid Body Contact feature in 3D and 2D. This is computationally more efficient compared to the mesh-based arbitrary shape option that was used in previous versions. This new option makes it possible to model sphere–planar as well as cylinder–planar contact in 3D and circular–planar contact in 2D. You can see this new feature in the Dynamics of a Roller Conveyor tutorial model.
{kind=link}
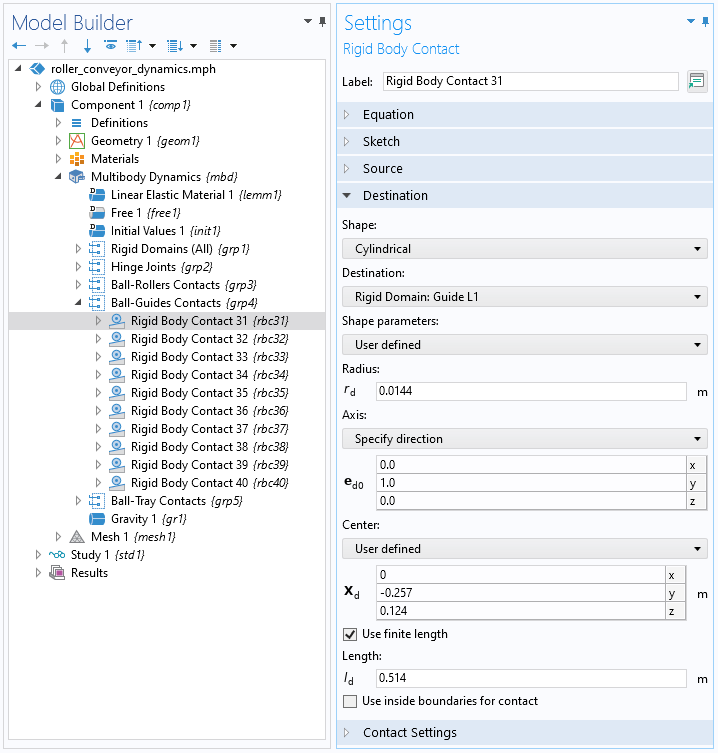
Shape Parameters Computation in Rigid Body Contact
In previous versions of COMSOL Multiphysics®, the geometrical shape parameters of standard-shaped rigid bodies (such as radius, center, axis, length, etc.) were specified by the user manually in the Rigid Body Contact node. Now, in both 2D and 3D, such geometrical parameters are automatically determined from the geometry of selected rigid domains. This makes the modeling process easier and more robust. View this in the Dynamics of a Roller Conveyor tutorial model.
{kind=link}
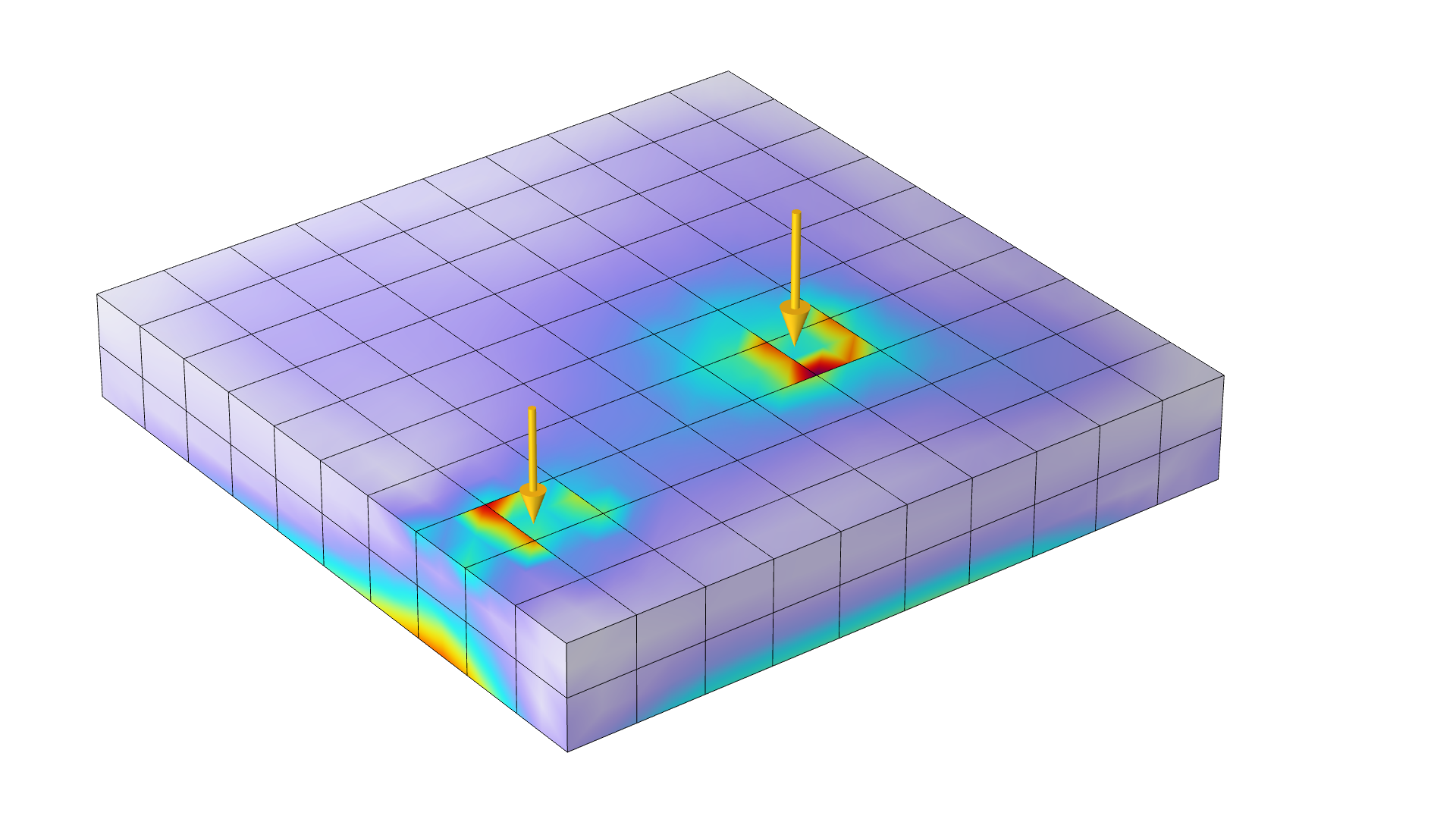
Point Loads at Arbitrary Locations
With the new Point Load, Free and Ring Load, Free features, point loads can be applied at arbitrary locations that do not coincide with a geometrical point or mesh node. This is particularly useful in the following cases:
- Imported meshes, where there may not be suitable points for load application
- Moving loads
- Models with many point loads, in which case it may be impractical to create geometry points at all load locations
This functionality is available in the Solid Mechanics, Shell, Plate, Membrane, Beam, Truss, and Multibody Dynamics interfaces.
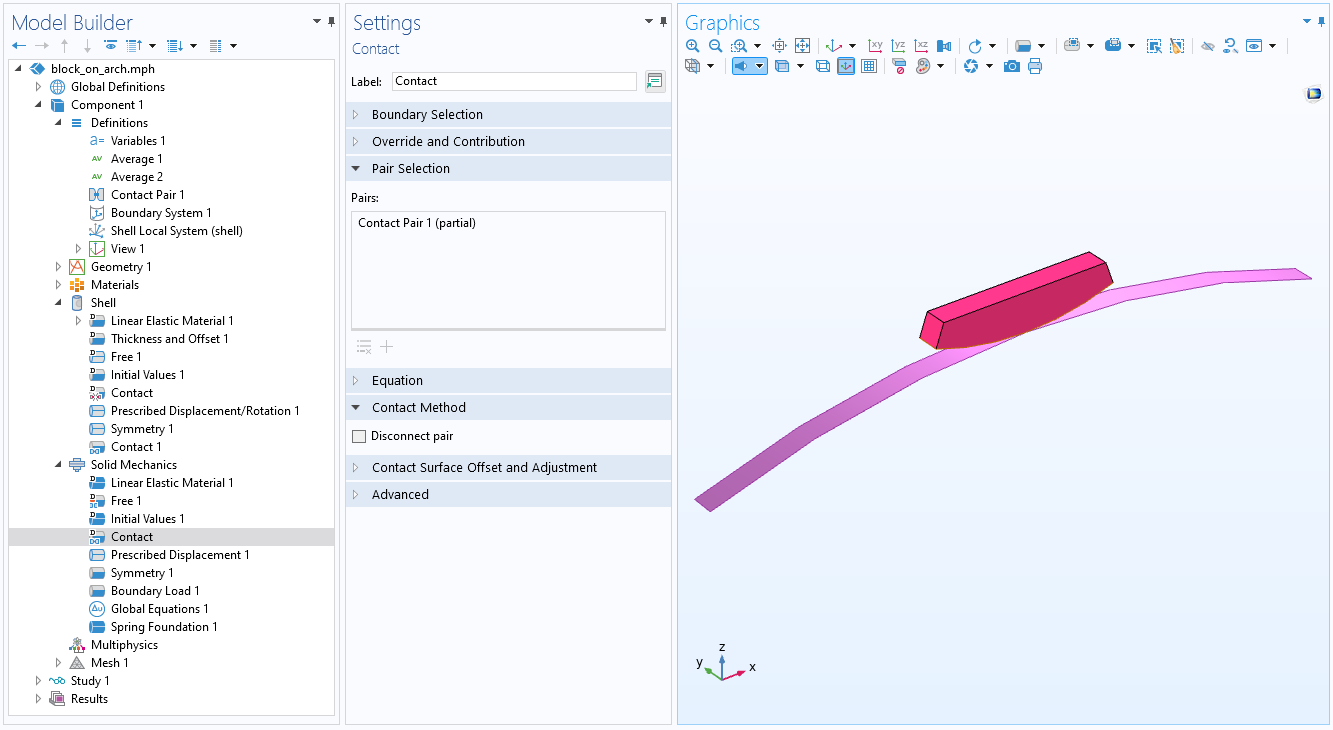
Significantly Easier Modeling of Mechanical Contact
Structural analysis of assemblies, including mechanical contact, is now significantly easier to set up. This is due to built-in automation of pairs, contact, and continuity features. If there is at least one contact pair in the model, then a default Contact node will automatically be created in the relevant structural mechanics interfaces. Similarly, if there is at least one identity pair, a default Continuity node is automatically created. Thus, if parts in your geometry are placed adjacent to each other, they will also be connected from the physics point of view, assuming that you are using automatic pair creation in the Form Assembly node in the geometry sequence.
As a result of the general reformulation of the pair functionality, the Source external to current physics check box in Contact is no longer needed and has been removed. That is, contact between different physics interfaces is also automatically handled.
All models containing Contact or Continuity have been updated accordingly.
{kind=link}
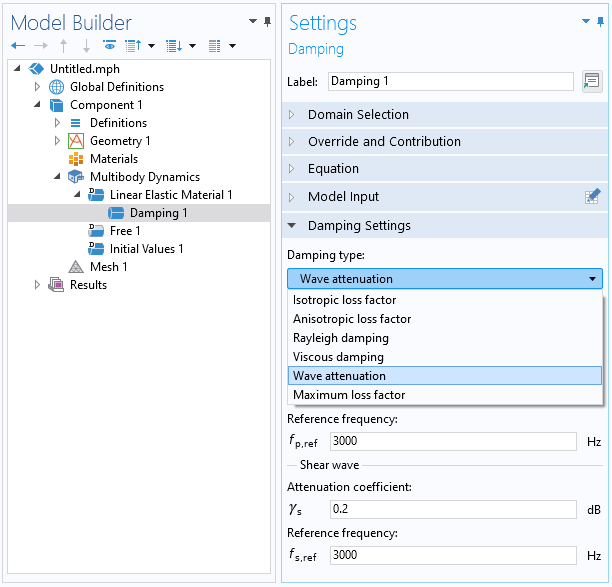
New Damping Models
New damping models have been added to the Linear Elastic Material feature:
- The Wave attenuation model is essentially a viscous model, but with parameters given by measured data for the attenuation of elastic waves in the material.
- The Maximum loss factor model is mainly intended for time-domain analysis of materials for which a loss factor representation provides a good description in the frequency domain.
{kind=link}
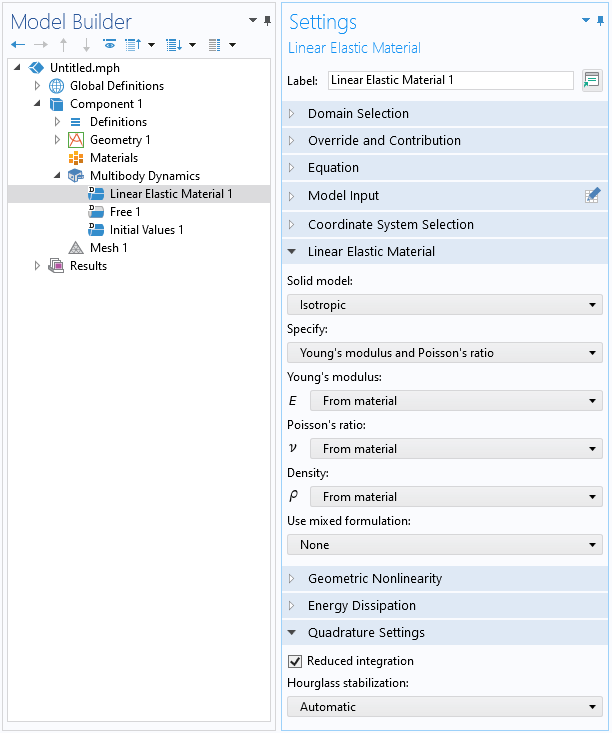
Reduced Integration
A new framework has been added for reduced integration. For elements with linear shape functions, reduced integration can cause singularities in the stiffness matrix. This is counteracted by the addition of hourglass stabilization. Reduced integration is controlled from the Quadrature Settings section in the Linear Elastic Material node. The selected integration rule will then be inherited by any subnodes that may be added.
{kind=link}
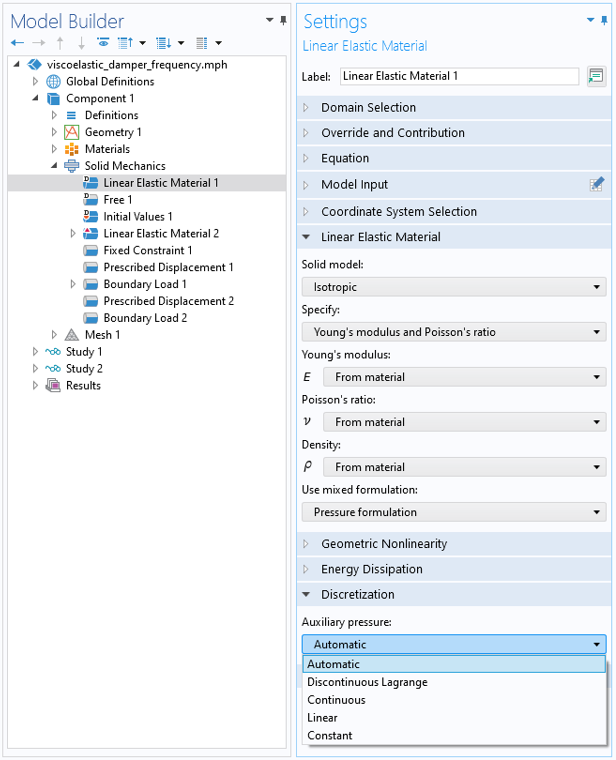
Improved Mixed Formulation
In material models that have an option to select a mixed formulation, you can now modify the discretization for the extra dependent variable (pressure or volumetric strain). This makes it easier to avoid locking and instabilities in materials with low compressibility.
When a mixed formulation is selected under the Linear Elastic Material settings, a new Discretization section will automatically appear for the material model. In this section, you can choose between different types of shape functions for the extra dependent variable.
{kind=link}
New Tutorial Models
COMSOL Multiphysics® version 6.0 brings several new tutorial models to the Multibody Dynamics Module.
Dynamics of a Roller Conveyor
Application Library Title:
roller_conveyor_dynamics
Download from the Application Gallery
Modeling Vibration and Noise in a Gearbox: CMS Version
Application Library Title:
gearbox_vibration_noise_cms
Download from the Application Gallery
Component Mode Synthesis Tutorial
Application Library Title:
cms_tutorial
Download from the Application Gallery