Solving Wave-Type Problems with Step Changes in the Loads
Here, we address how to set up and solve transient models in which the solution is expected to oscillate over time in response to step changes in the loads. We discuss the various built-in functions available in the COMSOL Multiphysics® software for defining smoothing for step, abrupt, or instantaneous changes in loads as well as how to smooth them.
The Pitfalls of Instantaneous Loading in Time-Dependent Studies
If a model is expected to oscillate over time in response to step changes in the loads, then careful consideration is required when applying the loads, regardless of the physics being solved, due to the way in which the Time-Dependent Solver node chooses the time step to compute the solution. By default, the software automatically adjusts the time-step size to capture (within the specified tolerance) the response of the system. This can lead to a very small time step if the applied load is instantaneously changing in time.
Consider, for example, a load that varies in time (as shown below) along with its Fourier transform. The load changes instantaneously, which leads to a lot of high-frequency content. Although the magnitudes of these higher-frequency components do drop off, they can still be significant. If we excite a structure with such a load, the software will try to resolve all of this high-frequency content, and it would start taking very small time steps (proportional to a fraction of the period) to compute the system response.
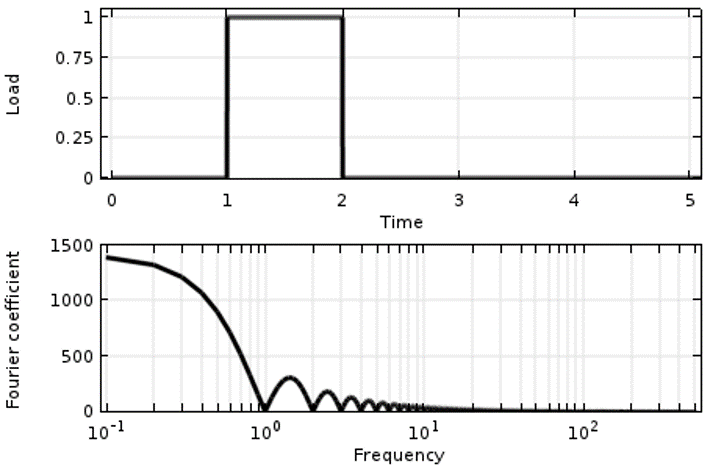
A Step load in time and its Fourier transform.
Improvements from Smoothing Instantaneous Loads
From a modeling point of view, we may not actually be interested in all of the high-frequency content (the higher overtones, small vibrations, etc., in the solution). The resolution is to smooth the input signal such as to avoid any abrupt changes, which is physically motivated because most loads cannot truly change instantaneously. It is also reasonable from a modeling point of view: The high-frequency content contains a relatively small fraction of the total energy of the system and is likely of little practical interest. An example of such a smoothed input signal, as well as its Fourier transform, is shown in red in the image below. Note that the low-frequency content of the signal is almost unchanged, but the smoothed signal has negligible higher-frequency content past a certain point, as compared to the original signal.
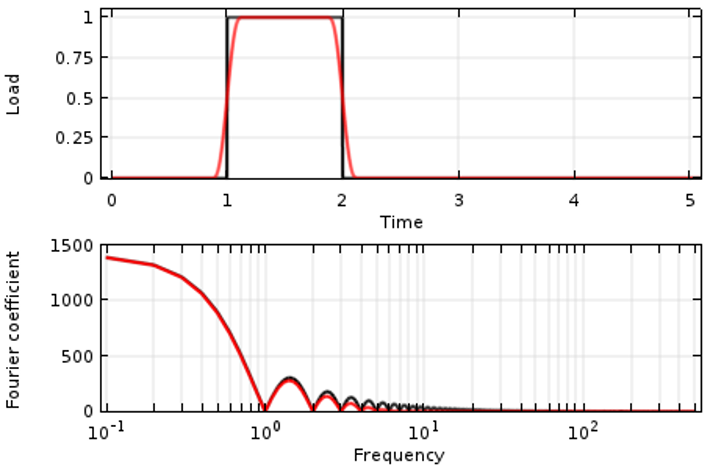
A smoothed Step load in time (red curve) and its Fourier transform.
Implementing Smoothing of Instantaneous Loads
The built-in Rectangle, Triangle, Step, Ramp, and Waveform (of type Sawtooth or Triangle) functions all include the option to smooth the signal, as shown for the Rectangle function in the figure below. The Piecewise function also permits smoothing between intervals. If you are setting up other types of user-defined loads, make sure to add some kind of smoothing to them as well. For more information, see the COMSOL Multiphysics Reference Manual > "Global and Local Definitions" > "User Defined Functions" > "Specifying Discontinuous Functions" > "Additional Smoothed Functions".
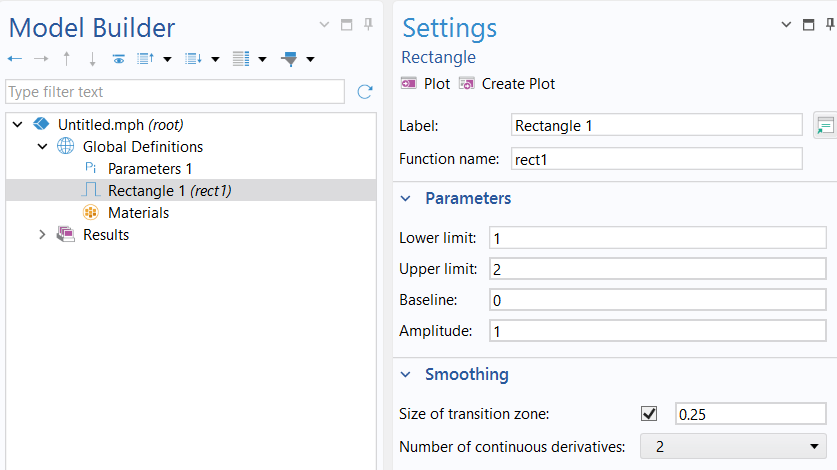
The Smoothing section of the settings for a function.
Once you have appropriately smoothed all of your loading functions, you will also know the maximum possible frequency content of your excitation. From there, you can choose the appropriate mesh and manually adjust the time step, as described in our resource on resolving time-dependent waves.
Further Learning
For more information on handling instantaneous load changes and for model examples that demonstrate resolving this, see the following resources:
- Learning Center:
- Tutorial models:
- Ultrasonic Flow Meter with Piezoelectric Transducers Tutorial Model (uses the Rectangle function for smoothing of instantaneous load)
- Thermoacoustic Engine and Heat Pump (uses the Ramp function for smoothing of instantaneous load)
- Phase-Field Modeling of Dynamic Crack Branching (uses the Step function for smoothing of instantaneous load)
- Documentation:
- COMSOL Blog:
- Knowledge Base:
Submit feedback about this page or contact support here.