Aggiornamenti del Multibody Dynamics Module
Agli utenti del Multibody Dynamics Module, COMSOL Multiphysics® versione 5.2a offre la capacità di modellare ingranaggi, utile per la trasmissione di potenza e le simulazioni in ambito automobilistico. Sono stati aggiunti numerose tipologie di ingranaggi alla libreria delle parti e molti tutorial che illustrano le potenziali applicazioni di questa funzionalità guidata dall'utente. Gli aggiornamenti del Multibody Dynamics Module sono descritti in dettaglio qui di seguito.Modellazione di ingranaggi
La funzionalità per modellare ingranaggi è ora disponibile nell'interfaccia Multibody Dynamics. È possibile modellare un sistema di ingranaggi per la trasmissione di potenza. I nodi disponibili sono per diversi tipi di ingranaggi e cremagliere, tra cui: Spur Gear, Helical Gear, Bevel Gear, Worm Gear, Spur Rack e Helical Rack. Si può collegare un ingranaggio ad altri aggiungendo i seguenti nodi alla struttura del modello nel Model Builder: Gear Pair, Worm and Wheel e Rack and Pinion.
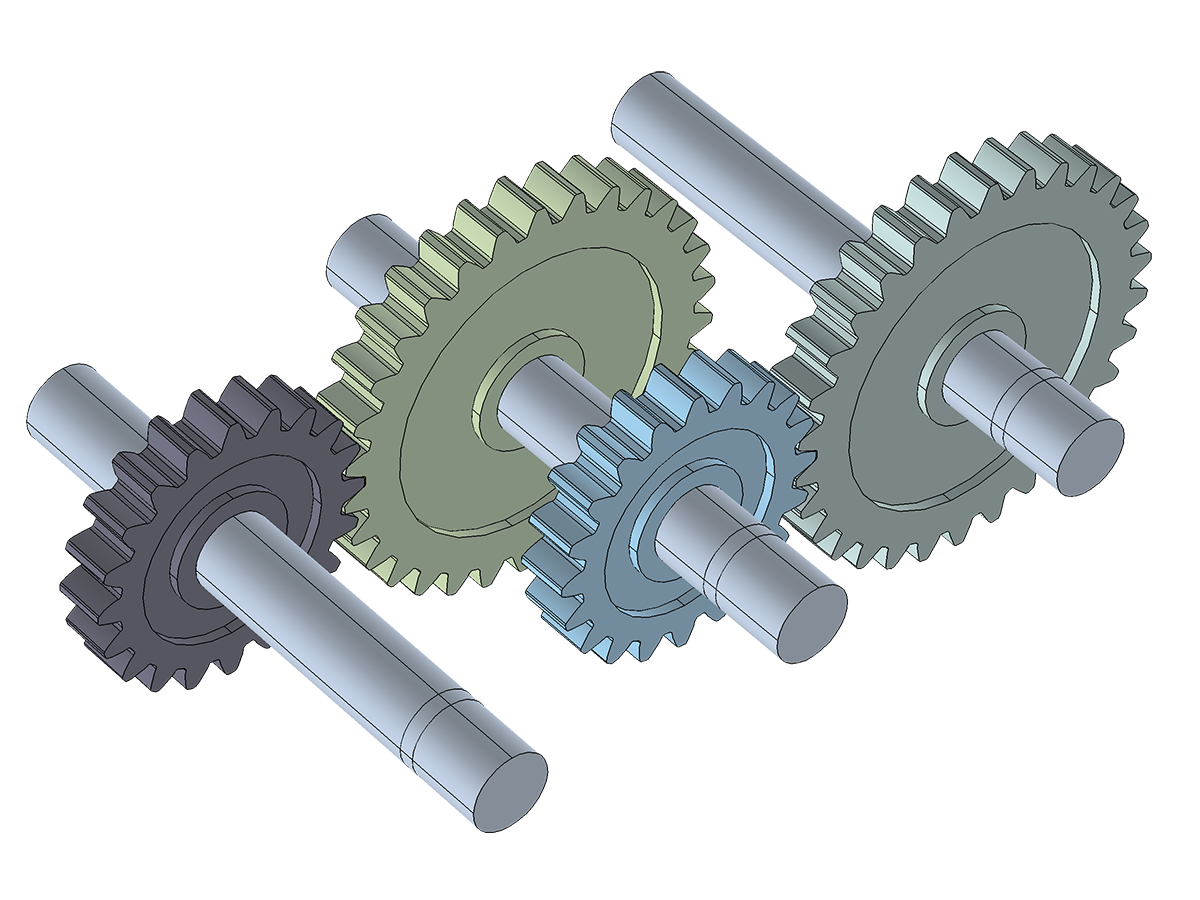
Un treno di ingranaggi composto, modellato utilizzando la nuova funzionalità Gears nell'interfaccia Multibody Dynamics.
Un treno di ingranaggi composto, modellato utilizzando la nuova funzionalità Gears nell'interfaccia Multibody Dynamics.
Nel Model Builder, un ingranaggio è definito come un corpo rigido. Tuttavia, è anche possibile specificare una rigidezza finita per descrivere come un ingranaggio si ingrana con altri ingranaggi. Nel Model Builder, è possibile aggiungere un nodo Gear Elasticity come nodo secondario di Gear Pair per definire le proprietà elastiche dell'ingranamento, quali rigidezza, smorzamento e rapporto di contatto.
Una coppia di ingranaggi può essere assunta come coppia ideale senza alcun errore di trasmissione statica o gioco. In presenza di un errore di trasmissione statica, che potrebbe essere causato da errori geometrici e modifiche geometriche, si può aggiungere un nodo Transmission Error al nodo Gear Pair. Questi esempi includono errori di oscillazione, disallineamento o un'interferenza. Allo stesso modo, in presenza di un gioco che interessa la dinamica del sistema, si può aggiungere un nodo secondario Backlash al nodo Gear Pair.
Inoltre, è possibile aggiungere un nodo secondario Friction al nodo Gear Pair per compensare le forze di attrito al punto di contatto. Le forze di attrito sono dominanti solo quando è presente uno slittamento sensibile in corrispondenza del punto di contatto. Tale slittamento potrebbe essere dovuto al cambiamento di interasse o agli assi di entrambi gli ingranaggi che non sono paralleli nè intersecanti. La coppia ruota - vite senza fine è un esempio di questo tipo di operazione, dove è presente uno slittamento anche in condizioni perfette.
Percorso della Application Library con esempi che illustrano la modellazione di ingranaggi: Multibody_Dynamics_Module/Automotive_and_Aerospace/differential_gear Multibody_Dynamics_Module/Tutorials/gear_train
Multibody_Dynamics_Module/Tutorials/helical_gear_pair Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
Ingranaggi nella Parts Library
Sono state aggiunte diverse geometrie di ingranaggi parametrizzati alla Parts Library. Si possono creare diversi tipi di ingranaggi con queste parti, per modelli 2D e 3D. I parametri di input delle parti possono essere modificati per personalizzare la forma dei denti e l'ingranaggio stesso. Queste parti possono essere utilizzate per costruire un dente, un singolo ingranaggio, una coppia di ingranaggi o un treno di ingranaggi.
Le parti disponibili sono suddivise in tre categorie:
-
External Gears
- Spur Gear
- Helical Gear
- Bevel Gear
- Worm Gear
-
Internal Gears
- Spur Gear
- Helical Gear
-
Spur Gear
- Spur Rack
- Helical Rack
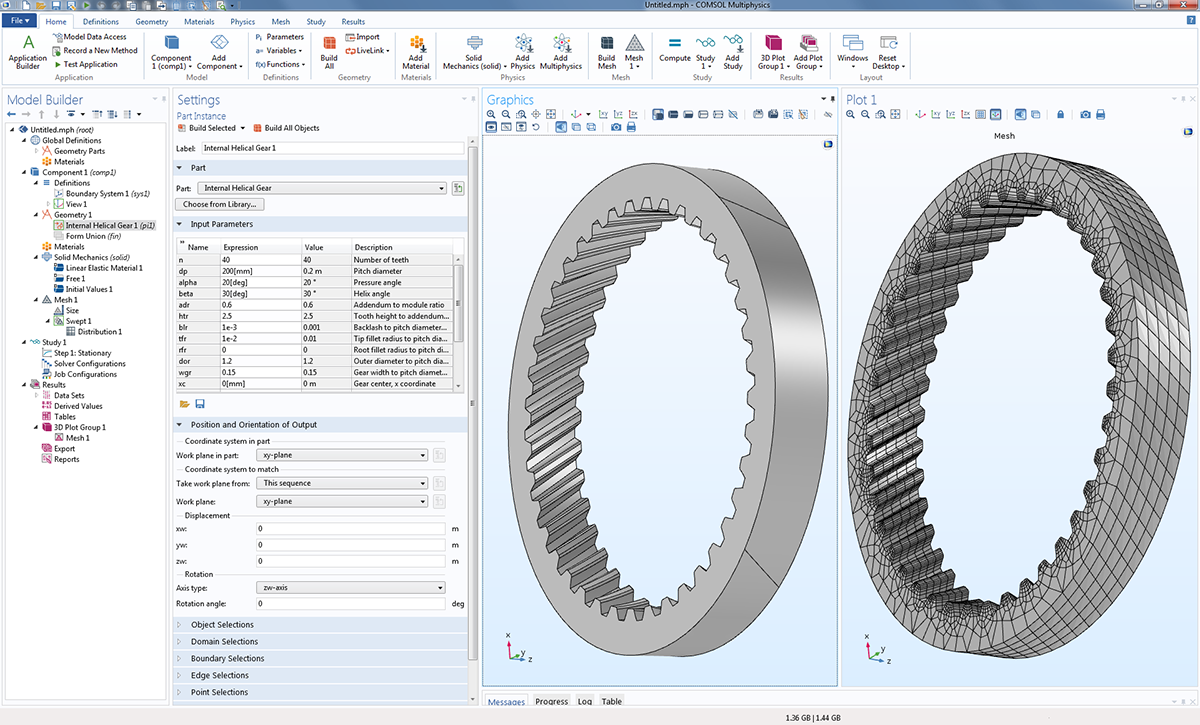
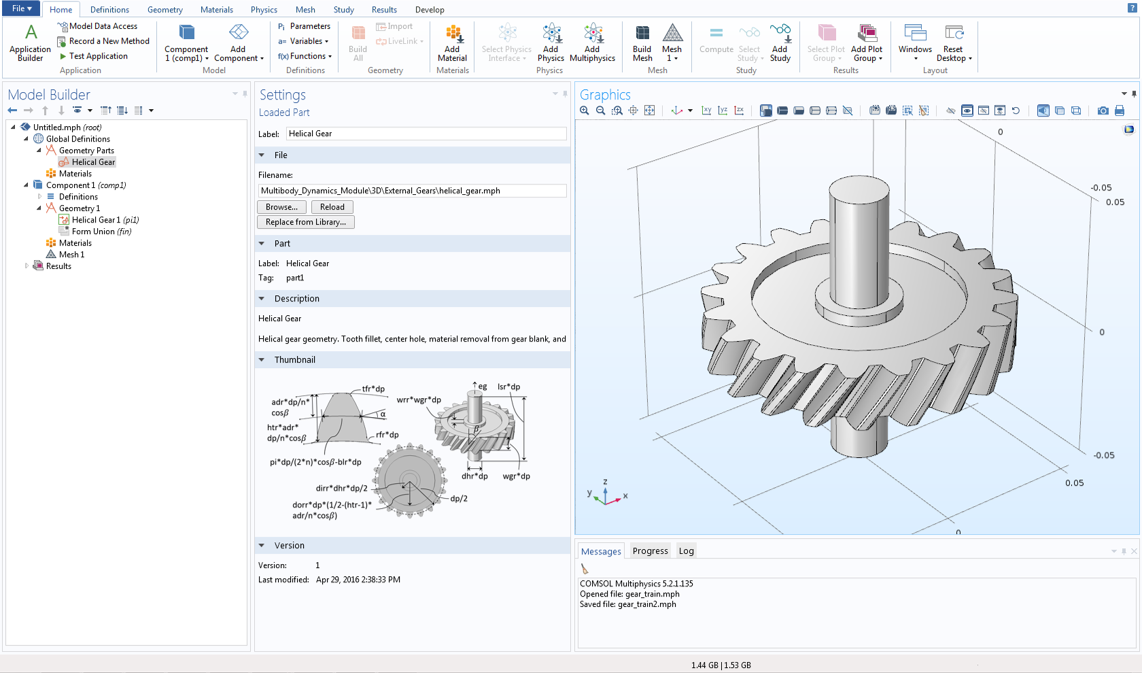 La geometria di un ingranaggio elicoidale, creata utilizzando le parti disponibili nella Parts Library del Multibody Dynamics Module.
La geometria di un ingranaggio elicoidale, creata utilizzando le parti disponibili nella Parts Library del Multibody Dynamics Module.
{kind=link}
Nuovo tutorial: Differential Gear Mechanism
Questo modello simula il meccanismo di un ingranaggio differenziale utilizzato in automobili e altri veicoli a motore. Un differenziale permette alla ruota motrice esterna di girare più velocemente rispetto alla ruota motrice interna in curva. Questo è necessario quando il veicolo svolta, per consentire alla ruota che sta viaggiando lungo l'esterno della curva di girare più velocemente e coprire una distanza maggiore della ruota interna alla curva. La media della velocità di rotazione delle due ruote motrici è semplicemente la velocità di rotazione dell'albero motore. L'aumento di velocità di una ruota è bilanciato decelerazione dell'altra.
Viene svolta un'analisi transitoria per calcolare il moto degli ingranaggi quando un veicolo viaggia su un rettilineo o in curva. Per i due casi vengono calcolati il modulo di velocità dei diversi componenti e la velocità angolare delle ruote interna ed esterna.
Percorso della Application Library con il tutorial che illustra i meccanismi di un ingranaggio differenziale:
Multibody_Dynamics_Module/Automotive_and_Aerospace/differential_gear
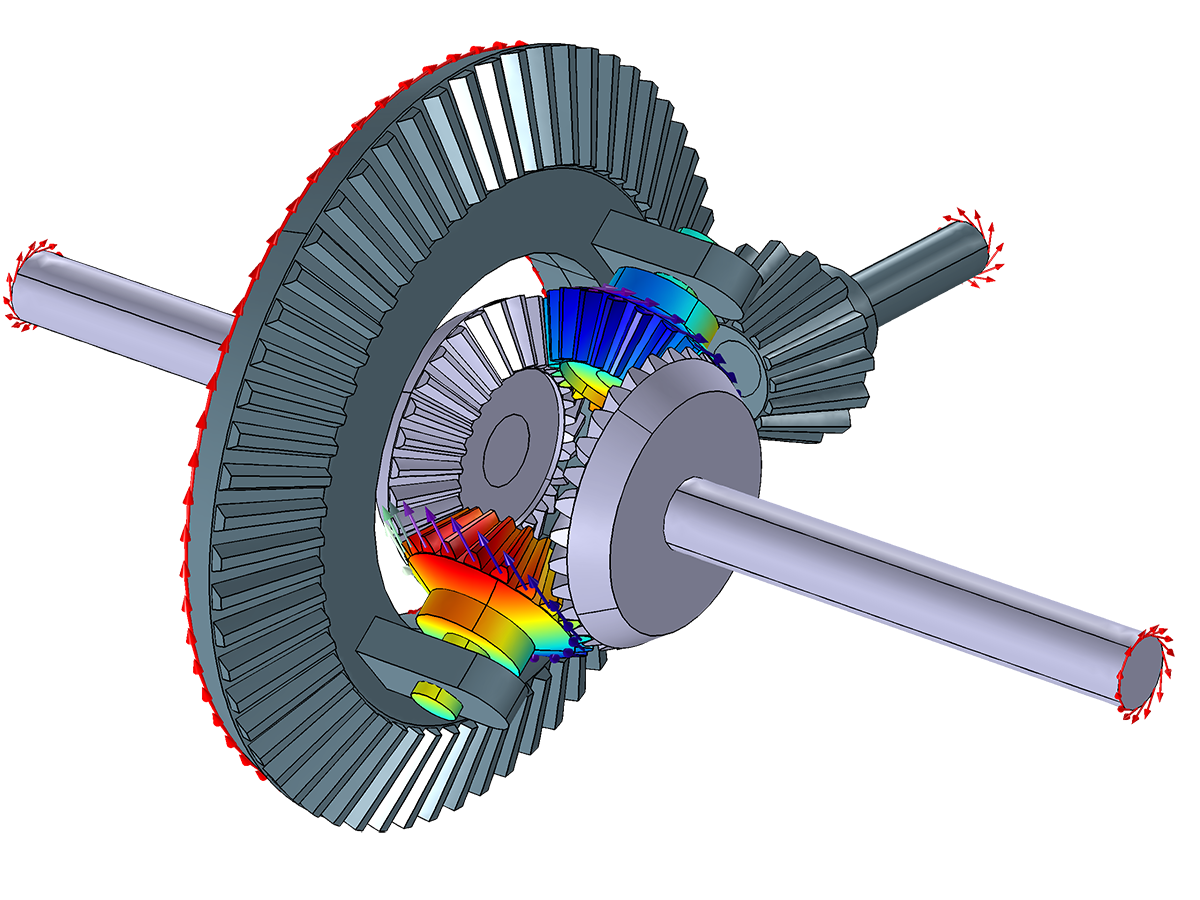 Il meccanismo di un ingranaggio differenziale, che permette ai due assi del veicolo ruotare a velocità diverse. Sono mostrati il modulo di velocità e le direzioni di rotazione.
Il meccanismo di un ingranaggio differenziale, che permette ai due assi del veicolo ruotare a velocità diverse. Sono mostrati il modulo di velocità e le direzioni di rotazione.
Nuovo tutorial: Vibrations in a Compound Gear Train
Questo modello simula le vibrazioni in un treno di ingranaggi composto. Gli ingranaggi a ruote dentate, utilizzati per modellare il treno di ingranaggi, sono montati su alberi rigidi, e gli alberi sono supportati da un alloggiamento elastico su entrambe le estremità. Si suppone che l'ingranamento sia elastico con rigididezza variabile, che è la fonte di vibrazione sostenuta. Un'analisi transitoria consente di calcolare la dinamica degli ingranaggi, come pure le vibrazioni nell'alloggiamento.
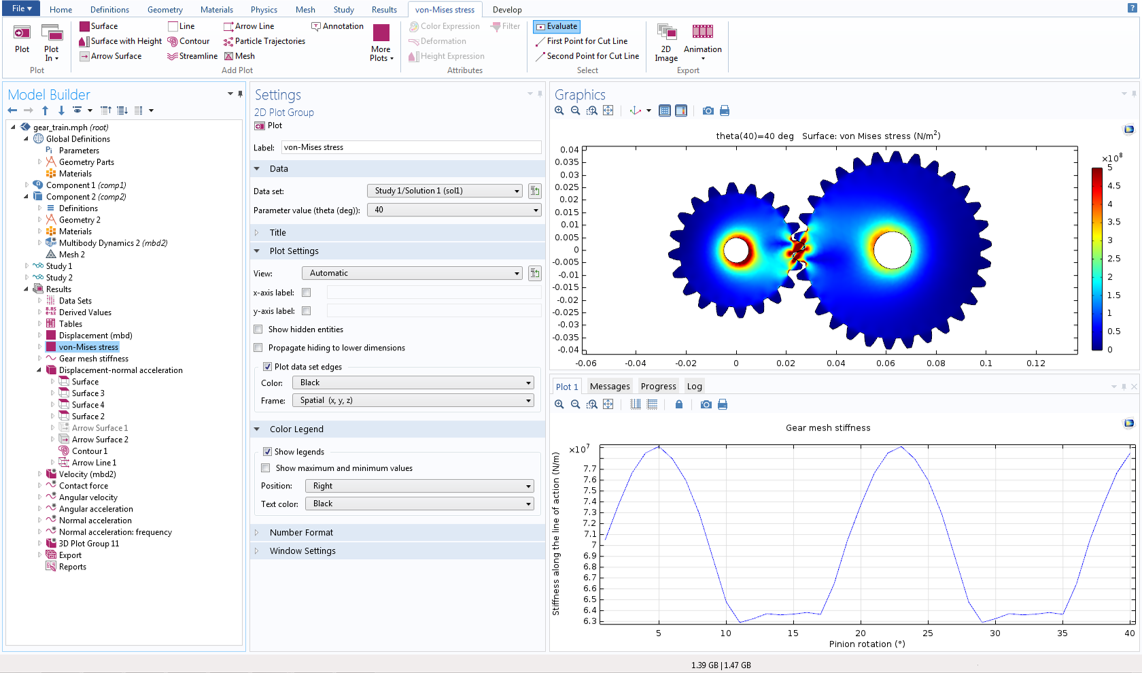
Una modellazione del contatto è usata per il calcolo della rigidezza dell'ingranamento. Per calcolare tale rigidezza in funzione della rotazione dell'ingranaggio in un unico ciclo viene eseguita un'analisi parametrica.
Il modello calcola la distribuzione dello sforzo di von Mises nella coppia, dove le tensioni sono alte nei punti di contatto, così come alla base dei denti. Vengono inoltre calcolati la rigidezza di ingranamento, lo spostamento negli ingranaggi e l'accelerazione normale nell'alloggiamento a causa delle vibrazioni.
Percorso della Application Library con il tutorial:
Multibody_Dynamics_Module/Tutorials/gear_train
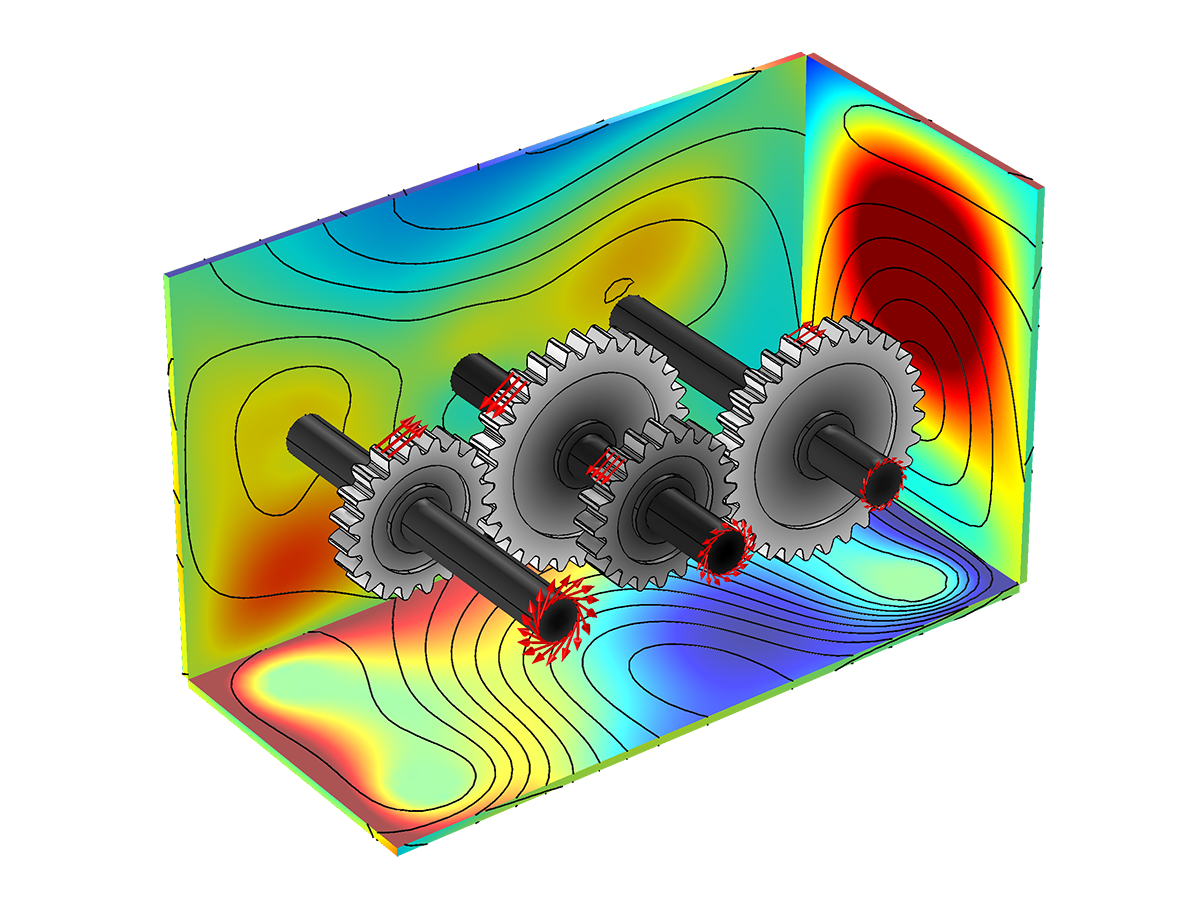 L'accelerazione normale nell'alloggiamento a causa delle vibrazioni indotte dall'ingranamento elastico. Viene inoltre illustrato il grafico in scala di grigi dello spostamento degli ingranaggi.
L'accelerazione normale nell'alloggiamento a causa delle vibrazioni indotte dall'ingranamento elastico. Viene inoltre illustrato il grafico in scala di grigi dello spostamento degli ingranaggi.
{kind=link}
Nuovo tutorial: Dynamics of Helical Gears
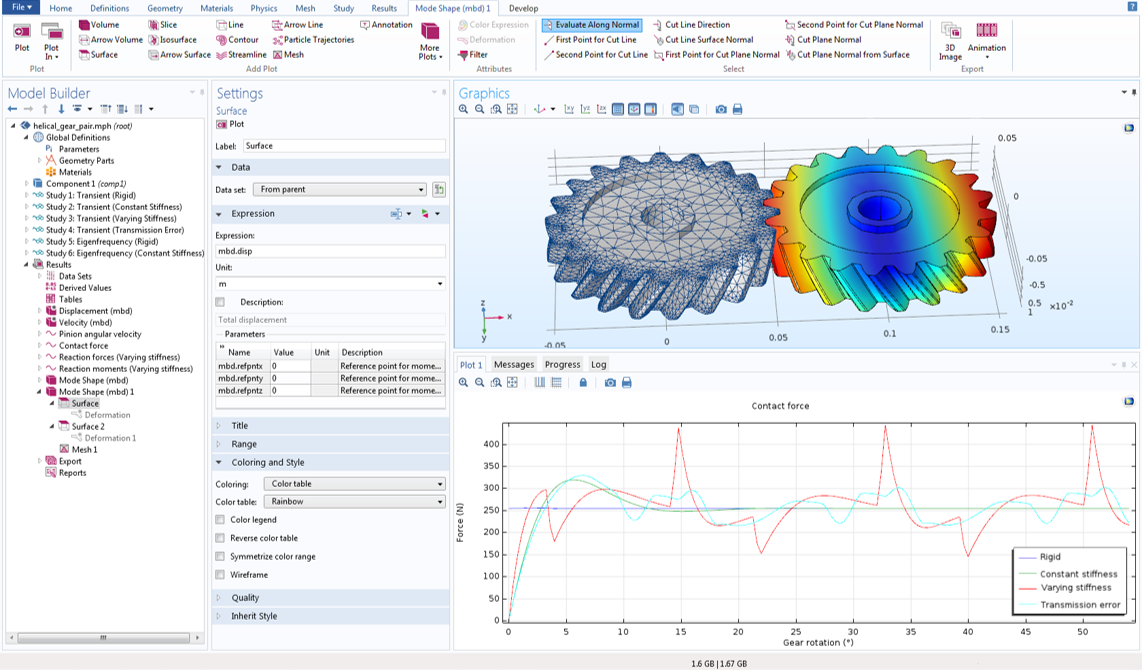
Questo tutorial illustra la dinamica degli ingranaggi elicoidali. Analizza sia il caso di ingranamento rigido che elastico. Viene eseguito uno studio transitorio per analizzare l'effetto della rigidezza di ingranamento costante e variabile, l'errore di trasmissione sulla forza di contatto e la velocità angolare degli ingranaggi. Viene eseguita un'analisi delle frequenze proprie per calcolare le frequenze naturali e le forme modali della coppia di ingranaggi sia per l'ingranamento rigido che elastico.
Percorso della Application Library con il tutorial:
Multibody_Dynamics_Module/Tutorials/helical_gear_pair
{kind=link}
Nuovo tutorial: Forces and Moments on Bevel Gears
Questo tutorial simula una coppia di ingranaggi conici dritti. Gli ingranaggi sono modellati rigidi, ma uno è fisso mentre l'altro è incernierato su una barra rigida. La barra rigida è a sua volta incernierata in un punto sull'asse dell'ingranaggio fisso. Per calcolare le forze ed i momenti al centro dell'ingranaggio fisso viene eseguita un'analisi transitoria. I risultati vengono confrontati con i risultati di un modello riferimento tratto da una rivista internazionale.
Percorso della Application Library con il tutorial:
Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
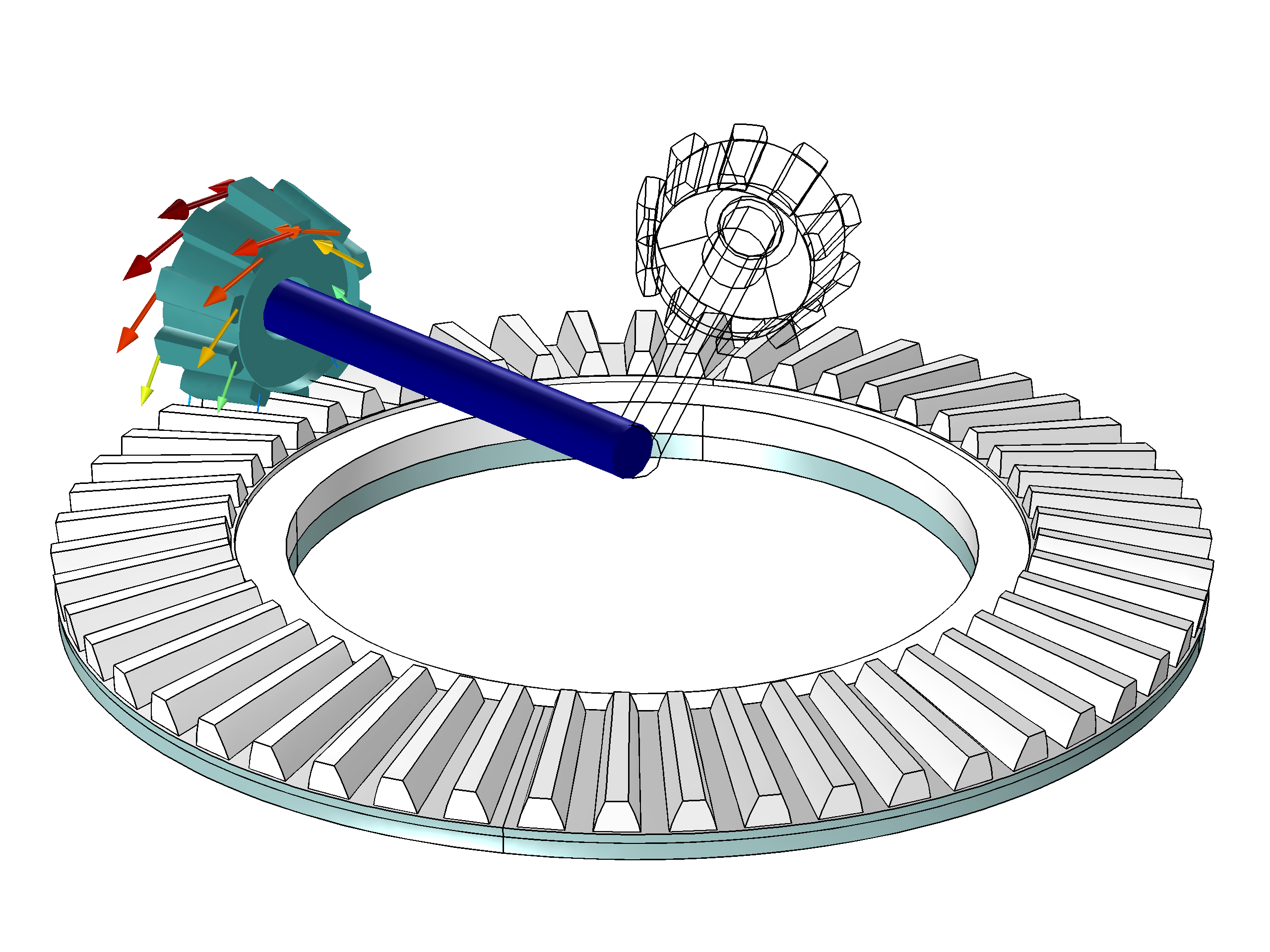 Il moto di una coppia conica quando è prescritta una rotazione incrementale alla barra rigida.
Il moto di una coppia conica quando è prescritta una rotazione incrementale alla barra rigida.